计算机视觉(4)随记
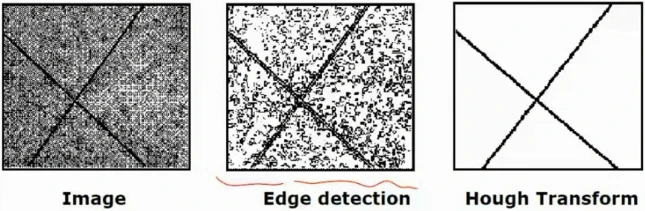
Haugh transform
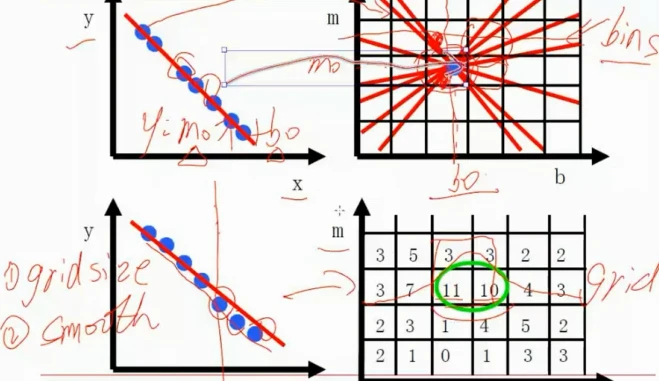
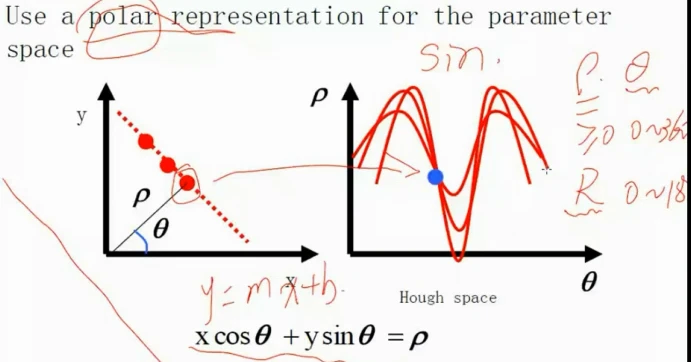
投票的时候,不是所有角度都投,一般只考虑梯度方向,因为边缘和梯度垂直。降低阈值让更多的直线被检测到,对于strong Edge增大权重,weak Edge降低权重 可以很容易把小物体检测出来,增强小物体的边缘投票,边缘的强弱要通过幅值来看。对于粗细搜索,先用粗的bin范围内搜索找到可能的位置,再通过小范围精细,这种方法使用情况很多。
示例:

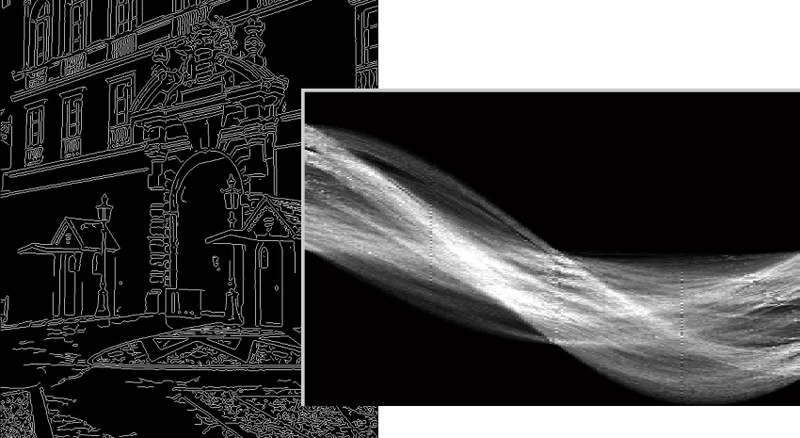
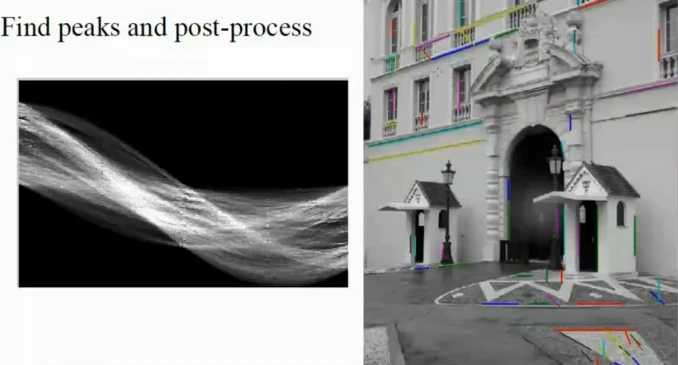
Hough Transform: Results
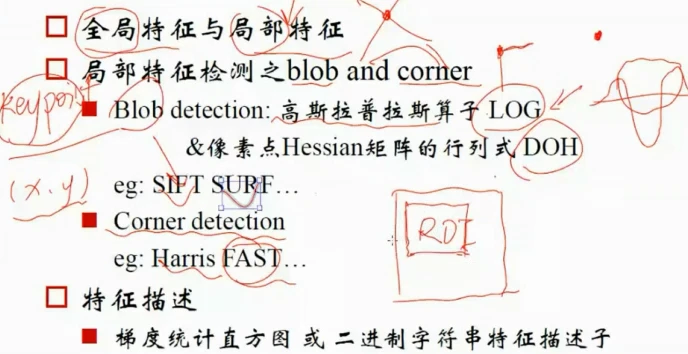
图像局部特征
局部特征是图像的局部表达,反应图像的局部特殊性,只适用于对图像进行匹配和检索等等,对图像理解并不合适。
图像理解更关注全局特征,比如颜色分布,文理特性,主要是物体的形状等等。全局特征容易受到环境的干扰,比如光照,旋转,噪声等等,这些因素只要稍微变化对全局特征的影响都很大。
相比全局特征,局部特征往往对图像中一些线条的交叉,明暗变化受到的干扰非常少,这时我们就需要引入局部特征,进行图像的匹配或者检索类需求。
blob(斑点)通常指的是周围有一些颜色,灰度差别的区域,比Corner抗噪要强,稳定性也好。
Corner指图像中一个物体的拐角或者两条直线的交叉部分。
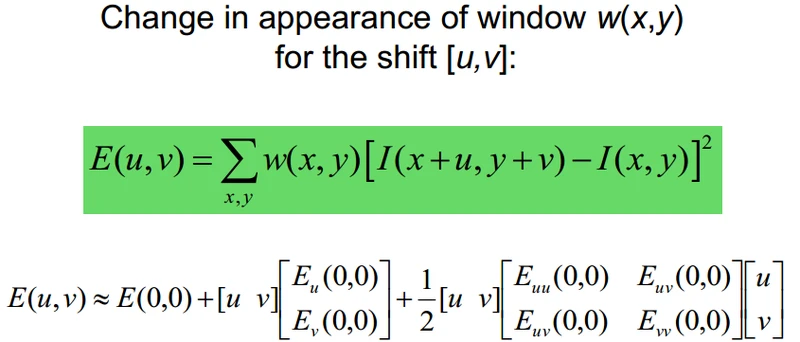
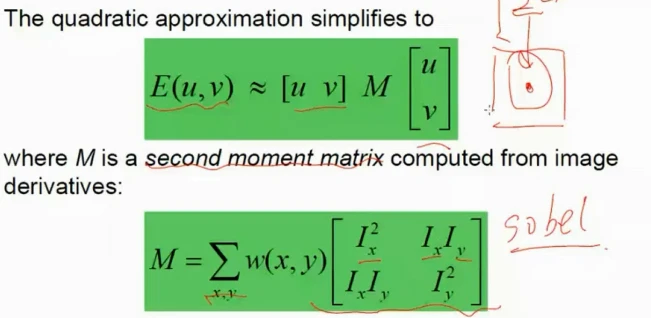
Corner Detection: Mathematics
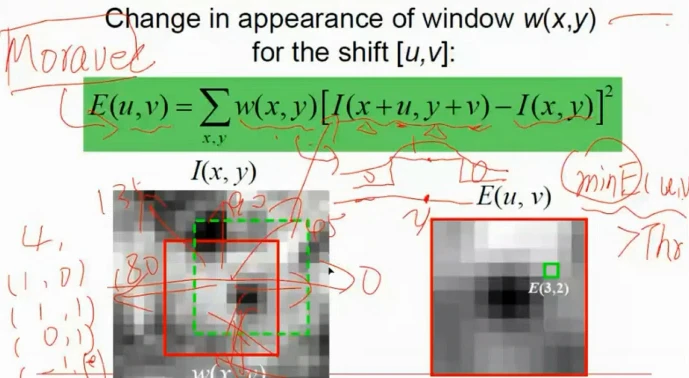
E(u,v) E表示窗口移动前后的灰度变化,u表示窗口在X轴上的移动距离,v表示窗口在y轴上的移动距离,w(x,y)是窗口函数。在4个方向找minE(u,v)大于某一个阈值来判断x,y的位置是否是一个角点。这种方法的缺点是只考虑了四个方向,如果矩阵框发生旋转,那就会都检测成了拐角,而且minE的值很容易搜到噪声污染。
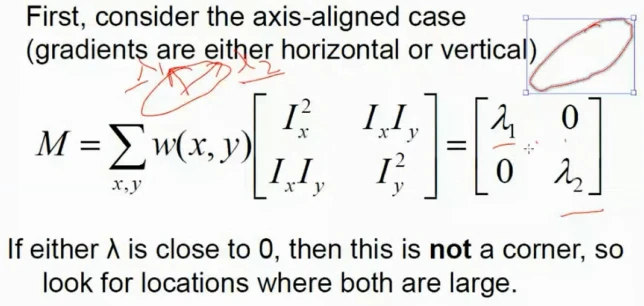
Interpreting the eigenvalues
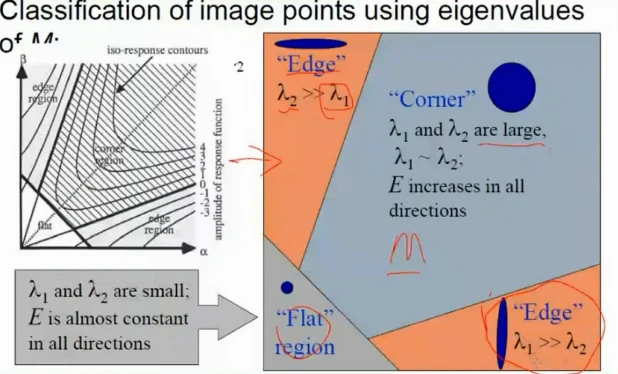
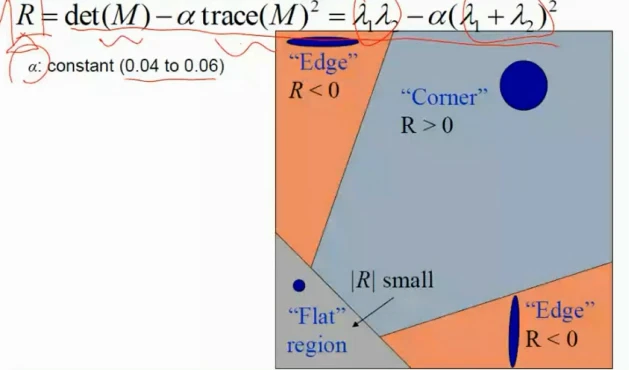
Corner response function
Scale Space
多尺度下的图像匹配,会用到高斯滤波
G越大越模糊